客户需求 :
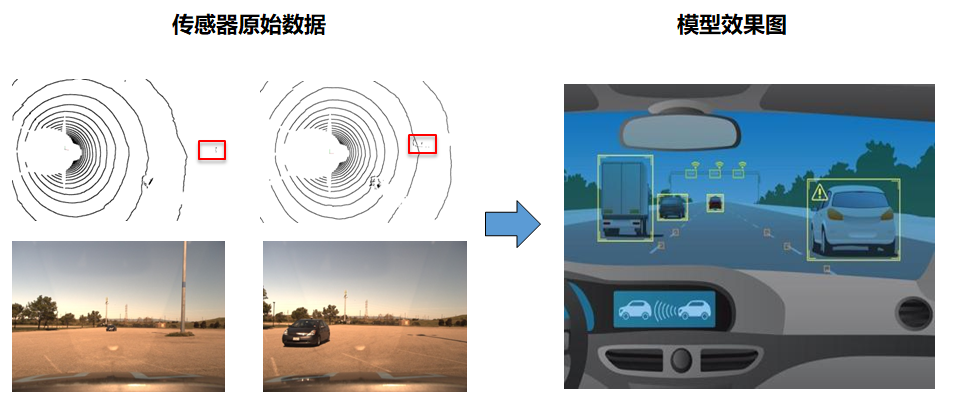
无人驾驶车辆的程序依赖于对路况的判断,目前来说无人驾驶技术一般采用lidar+radar+camera等方式捕捉车体四周的2d图片及3d扫描结果。而对这些结果进行校正和s实时耦合分析则是自动驾驶界的难题。 客户将无人驾驶测试车辆收集到的上百g数据交给我们,希望通过合理的方式建模,完成行驶路上车辆及行人判断问题。
技术栈和工具
C++,Python
完成效果
通过神经网络等算法编写模型,在客户真车上进行测试,在实时条件下精确判断35米以内行人和车辆,同时可以克服扬尘及雨雾路况。
最终制成专利交付甲方。效果图如下: